Safe Vision
Design of perception systems
 Zuxin Liu, Mansur Arief, Ding Zhao, ''Where Should We Place LiDARs on the Autonomous Vehicle?-An Optimal Design Approach,'' Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Montreal, Canada, May 20-24, 2019.
|
Zuxin Liu, Mansur Arief, Ding Zhao, ''Where Should We Place LiDARs on the Autonomous Vehicle?-An Optimal Design Approach,'' Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Montreal, Canada, May 20-24, 2019.
|
Abstract — Considering its reliability to provide accurate views along with precise distance measures under highly
uncertain driving conditions, autonomous vehicle (AV) shall have an optimized sensing and perception design that can minimize perception
errors. Sensors (e.g. cameras, LiDAR, etc), however, are not cheap and hence AV designers shall be able to best-calibrate the sensor
configurations to fully utilize its capability. This line of research studies various ways to optimize the design of perception systems
(sensors, configurations, processings algorithms, etc.) to achieve robust, safe, and affordable self-driving designs.
Annotation of Self-Driving Data
 Hasan Arief, Mansur Arief, Manoj Bhat, Ulf Indahl, Håvard Tveite, Ding Zhao, ''Density-Adaptive Sampling for Heterogeneous Point Cloud Object Segmentation in Autonomous Vehicle Applications,'' Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, USA, Jun 2019.
|
Hasan Arief, Mansur Arief, Manoj Bhat, Ulf Indahl, Håvard Tveite, Ding Zhao, ''Density-Adaptive Sampling for Heterogeneous Point Cloud Object Segmentation in Autonomous Vehicle Applications,'' Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, USA, Jun 2019.
|
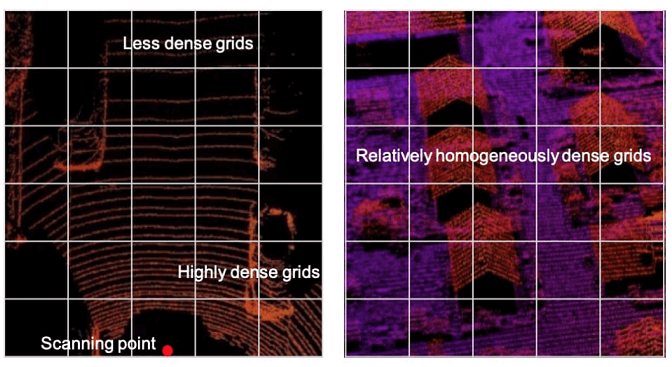
Abstract — Robust understanding of the driving scene is among the key steps for accurate object detection and reliable
autonomous driving. Accomplishing these tasks with a high level of precision, however, is not trivial. One of the challenges comes
from dealing with nature of point clouds data, e.g. heterogeneous density distribution, highly imbalanced class, sparsity, etc.,
making the crude adoption of deep learning architectures meaningless. This line of research focuses on the incorporation of
self-driving domain knowledge, such as motion, scene, or driving models, in constructing an efficient, robust, and (semi- or fully-)
automated annotation scheme to process the massive data recorded by self-driving cars.
Lidar Configuration
 Shenyu Mou, Yan Chang, Wenshuo Wang, Ding Zhao, ''An Optimal LiDAR Configuration Approach for Self-Driving Cars,'' 98th TRB Annual Meeting (TRB), Washington, USA, January 13–17, 2019.
|
Shenyu Mou, Yan Chang, Wenshuo Wang, Ding Zhao, ''An Optimal LiDAR Configuration Approach for Self-Driving Cars,'' 98th TRB Annual Meeting (TRB), Washington, USA, January 13–17, 2019.
|
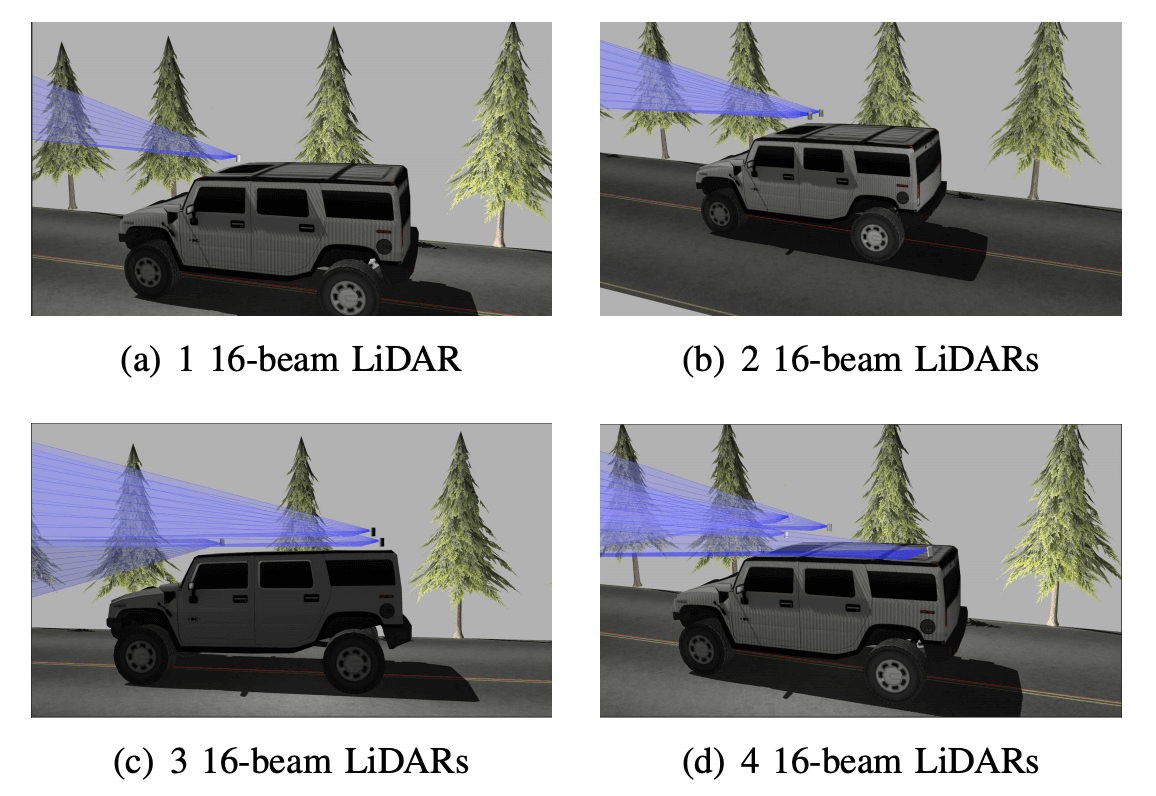
Abstract —
LiDARs plays an important role in self-driving
cars and its configuration such as the location placement
for each LiDAR can influence object detection performance.
This paper aims to investigate an optimal configuration that
maximizes the utility of on-hand LiDARs. First, a perception
model of LiDAR is built based on its physical attributes.
Then a generalized optimization model is developed to find
the optimal configuration, including the pitch angle, roll angle,
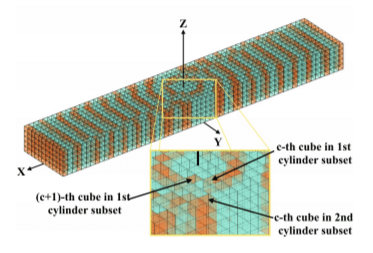
and position of LiDARs. In order to fix the optimization
issue with off-the-shelf solvers, we proposed a lattice-based
approach by segmenting the LiDAR’s range of interest into
finite subspaces, thus turning the optimal configuration into
a nonlinear optimization problem. A cylinder-based method is
also proposed to approximate the objective function, thereby
making the nonlinear optimization problem solvable. A series
of simulations are conducted to validate our proposed method.
This proposed approach to optimal LiDAR configuration can
provide a guideline to researchers to maximize the utility of
LiDARs.