Build Trustworthy AI Generalists for Critical Applications at Scale



What is Safe AI Lab?
The Safe AI Lab at CMU aims to design trustworthy physical AI Agents for high-state applications at scale by bridging fundamental machine learning theories and engineering technologies. We actively collaborate with leading industrial partners, including Google, Nvidia, Amazon, Apple, Microsoft, IBM, Ford, Uber, Bosch, Toyota, Rolls-Royce, and Boeing, as well as with healthcare providers like the Mayo Clinic, Highmark, and the Cleveland Clinic.
Research Projects
Trustworthy AI Generalist
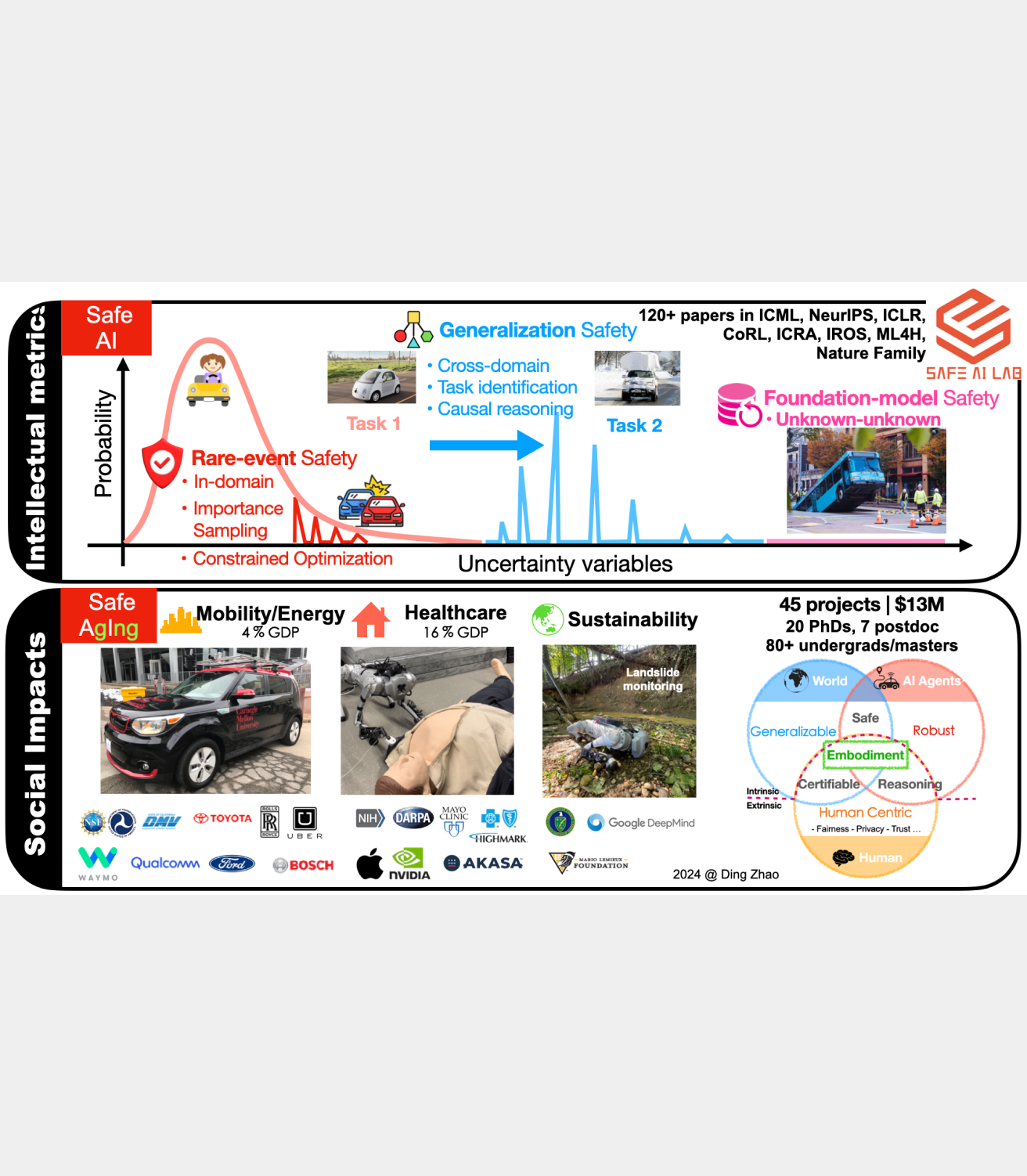
Capability to generalize to unseen environments.
AI Safety
Make decisions with critical constraints.
Critical Digital Twins
Generative AI with insuffice data.
Physical AI
Apply AI to Mobility/Energy and healthcare.
Long-horizon sequential decision-making.
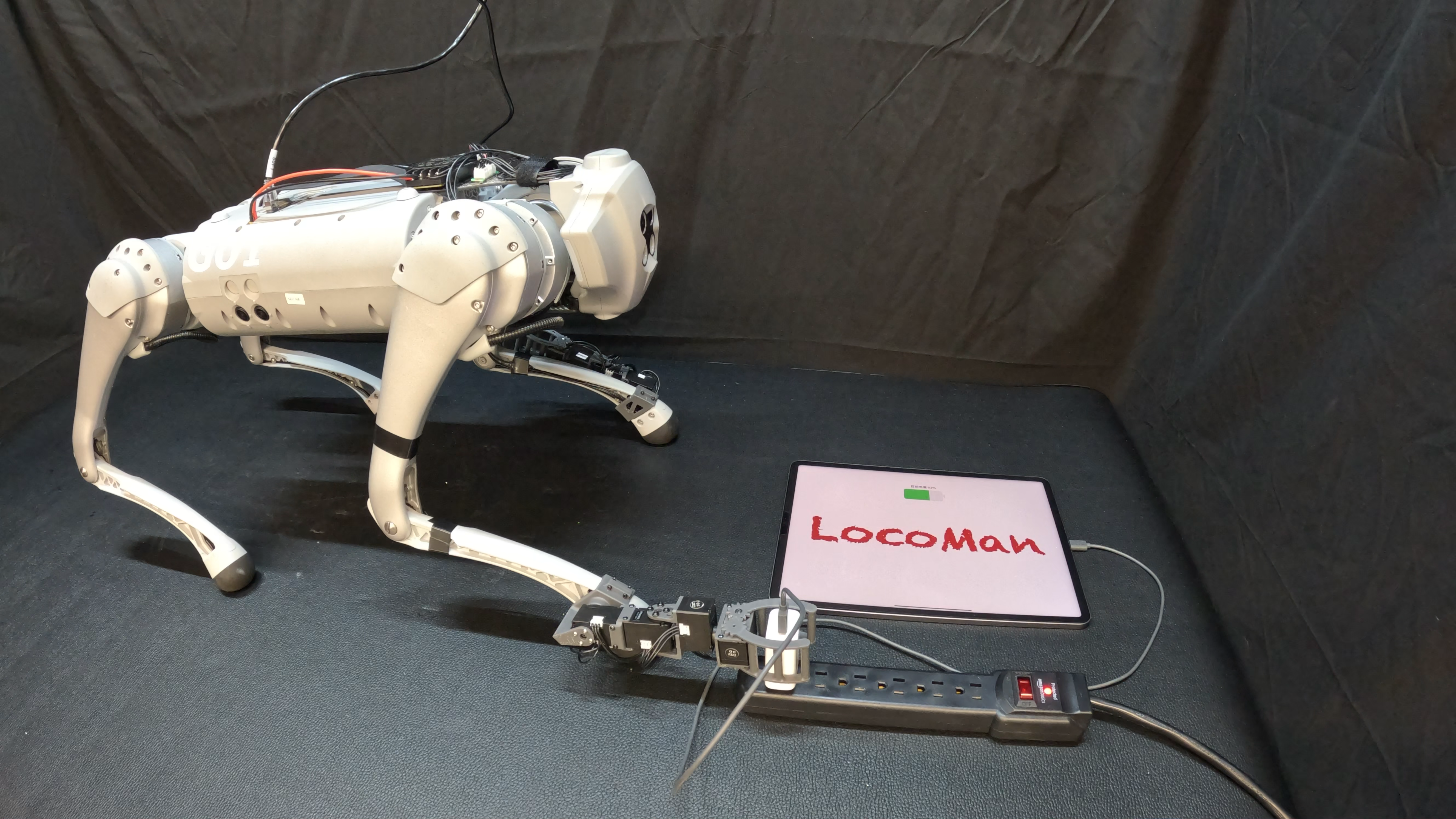
Versatile humanoid manipulation with touch dreaming.
Digitalize traffic law to safe-guard autonomous vehicles
Safe AI Generalist
Generating realistic driving scenarios with critical generative AI.
Foundation modals for cardiac diagnosis.
Theoretical foundation for new Turing tests for AI.
Multi-agent safe decision-making.
AI Generalist for robotic tool use and manufacture.
Education
"By combining deep knowledge of AI safety with engineering domain knowledge, I aim to cultivate a new generation of professionals who harness AI to transform and empower a broad range of industries."
My decade-long goal is to cultivate 10 professors, train 100 industry experts
through sponsored projects, and educate 1,000 students in the classrooms to lead the transformative change when applying AI to critical
industries safely and responsibly. I am 90% x 95% x 98.1% away from the goal. See our Alumni.
90%

Focus on creating safe and generalizable AI. The most sought-after course in the program. Uses in autonomous vehicles, robotics, and medical diagnostics.

Optimal, stochastic, and adaptive control based on models. Fundamental principles for robotics and reinforcement learning. Uses in autonomous vehicles and drones.
Investigating the synergy between AI and the Arts/Humanities. Instructed by a diverse team of engineers, artists, and social scientists from four CMU colleges. Uses in movie production, evaluating AI-created art, and designing with a focus on human needs.
Focus on creating safe and generalizable AI. The most sought-after course in the program. Uses in autonomous vehicles, robotics, and medical diagnostics.
Optimal, stochastic, and adaptive control based on models. Fundamental principles for robotics and reinforcement learning. Uses in autonomous vehicles and drones.
Investigating the synergy between AI and the Arts/Humanities. Instructed by a diverse team of engineers, artists, and social scientists from four CMU colleges. Uses in movie production, evaluating AI-created art, and designing with a focus on human needs.
Media
"Our work has garnered attention from media outlets such as the New York Times, Forbes,
TIME, Telegraph, and Wired."
Academic Talk
Lab Intro
Members
- Associate Professor and Dean's Early Career Fellow Professor Mechanical Engineering Department
- Computer Science Department
- Robotics Institute
- CyLab Security & Privacy Institute
- Wilton E. Scott Institute for Energy Innovation
![]() Accelerated Evaluation of Automated Vehicles , University of Michigan,
advised by Huei Peng
Accelerated Evaluation of Automated Vehicles , University of Michigan,
advised by Huei Peng
![]() Provost's Inclusive Teaching Fellows Award, IEEE George N. Saridis Best
Transactions Paper Award, George Tallman Ladd Research Award, MIT Technology
Review 35 under 35 Award in China, National Science Foundation CAREER Award,
Ford University Collaboration Award, Qualcomm Innovation Award,
Carnegie-Bosch Research Award, Struminger Teaching Award
Provost's Inclusive Teaching Fellows Award, IEEE George N. Saridis Best
Transactions Paper Award, George Tallman Ladd Research Award, MIT Technology
Review 35 under 35 Award in China, National Science Foundation CAREER Award,
Ford University Collaboration Award, Qualcomm Innovation Award,
Carnegie-Bosch Research Award, Struminger Teaching Award
"Education is a profession of compound returns, where each effort ripples forward — a lifelong friendship with time itself."
— Ding Zhao, Director of Safe AI Lab
Contact us
Please email me to request an appointment.