Mobile Robot
Project student members: Zuxin Liu, Hongyi Zhou, Jiayin Xia, Sean Birke, Haitong Wang.
Advisor: Prof. Ding Zhao.
The Mobile Robot Platform
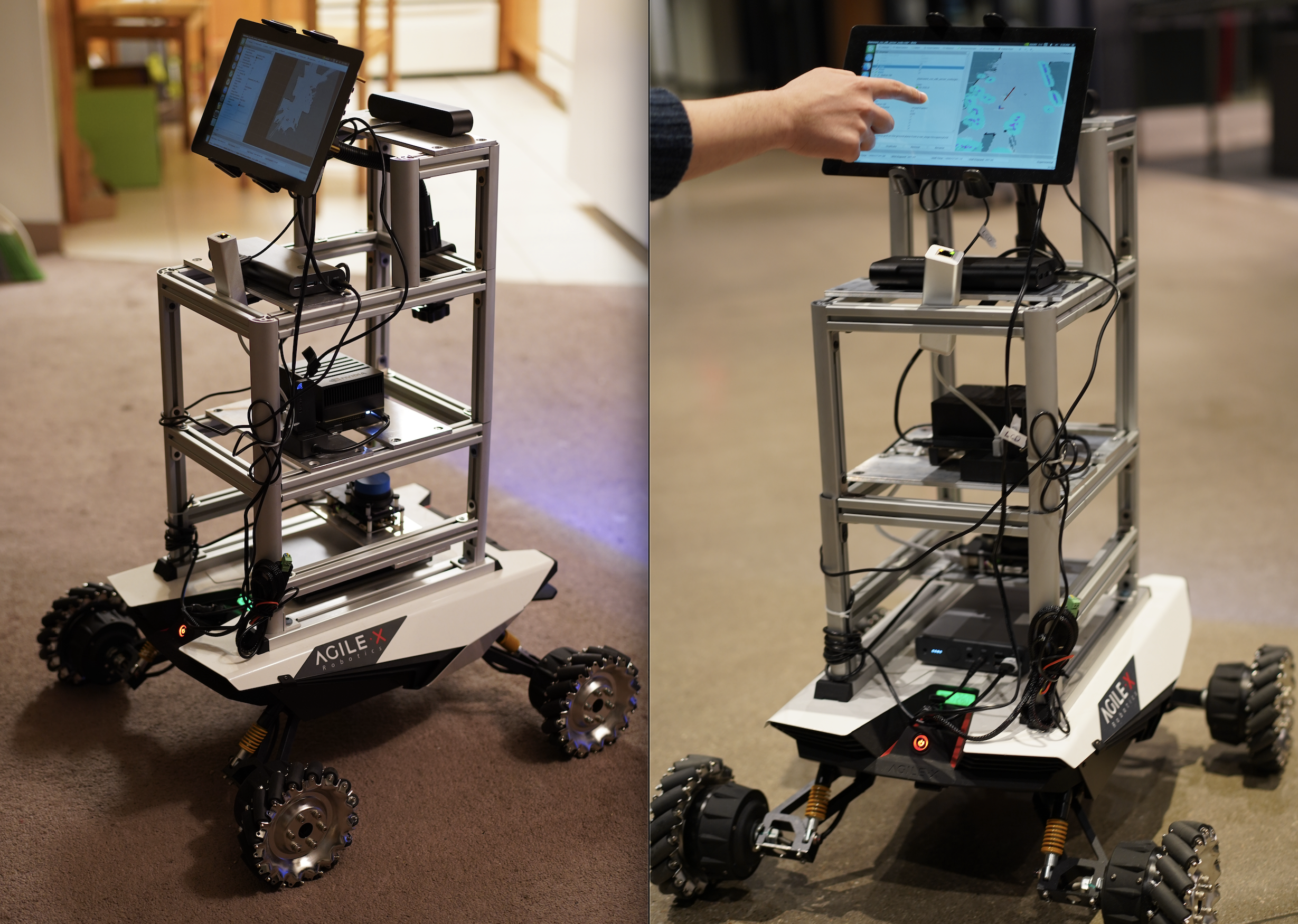
The mobile robot is equipped with a lidar, a steoreo camera, a NVIDIA computing platform and a touch screen. They will be able to link to a robot operating system.
Research Applications
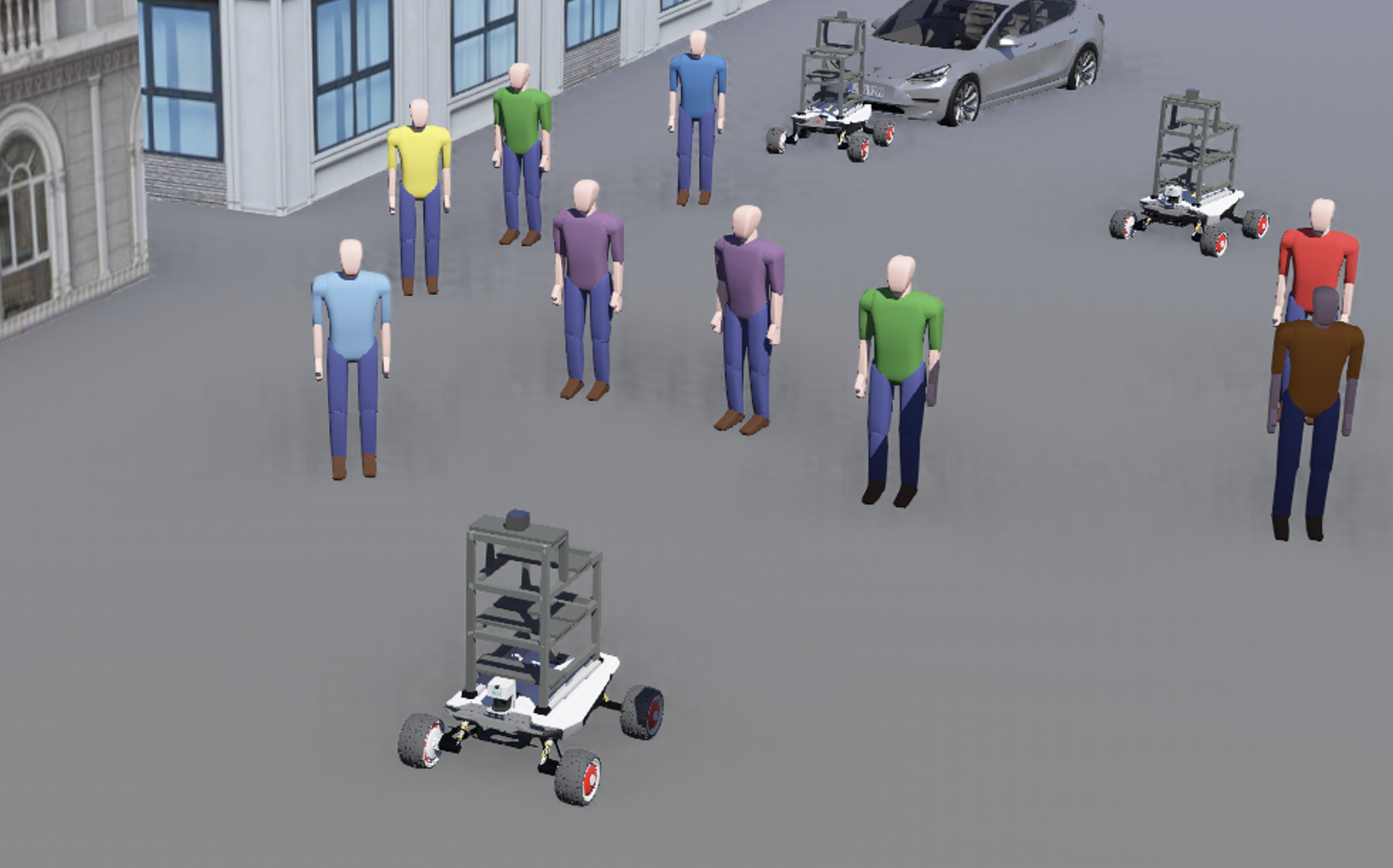
The mobile robot will be used in a variety of research topics, such as multi-robot coordination in warehouse environment and food delivery on sidewalks. We have built an autonomous navigation pipeline based on ROS, including perception, localization, mapping, planning and control. We are also working on the simulation environment for this robot based on webots, which can be used for reinforcement learning topics. We will open-source the simulation environment and planning code in the future.
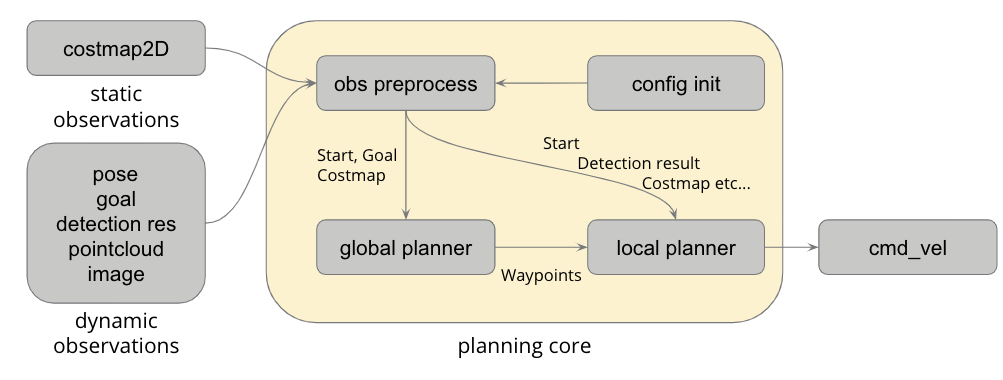
Path Planning Module Framework
Autonomous Navigation with Collision Avoidance

User-friendly Human Robot Interface with a Touch Screen
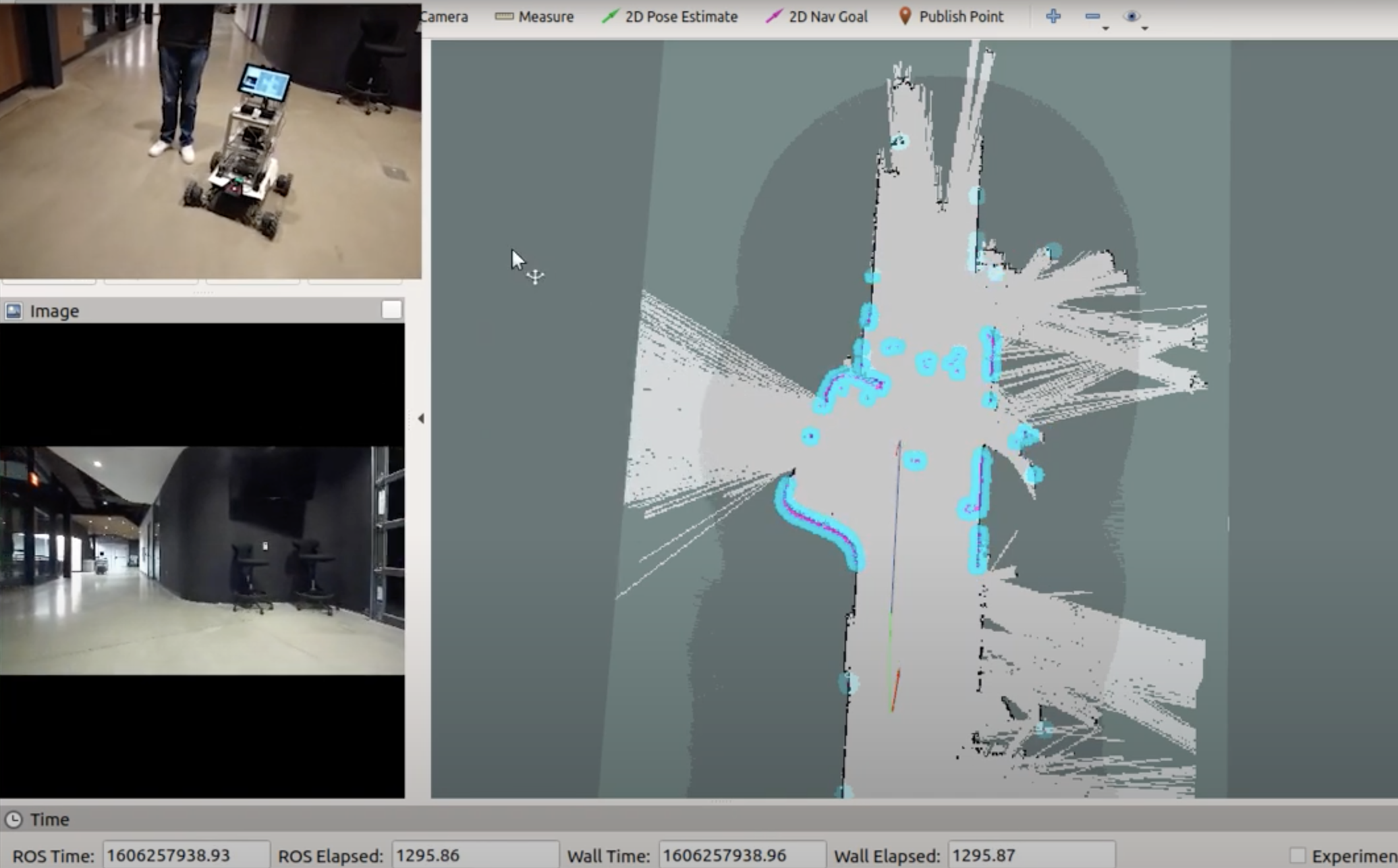
Autonomous Navigation in the Mill-19 Building
Autonomous navigation demo based on ROS navigation stack.